服務熱線
隨著機器人技術的快速發展,遙操作機器人作為代替人類在危險環境中完成高危任務或在醫療領域完成遠程精密手術的完美解決方案,正在快速進步,并有望成為擁有巨大潛力的機器人行業的全新發展方向。
本文將就推動機器人遙操作領域發展的力反饋手套展開討論,帶大家了解目前市場中幾款熱門的力反饋手套和其在遙操作機器人應用中的實際案例。
SenseGlove Nova 2是SenseGlove最新發布的一款觸覺力反饋數據手套,手套結合了力反饋、振動觸覺反饋和運動捕捉等功能,采用緊湊無線設計,佩戴、校準調試簡單方便。

enseglove Nova 2 首次加入了手掌主動式力反饋功能,這使得手套能夠模擬在抓握情況下手掌部位的受力狀態,為用戶帶來更加身臨其境的操作體驗。
SenseGlove具備精確的手指追蹤功能,能夠準確地捕捉操作員手指的動作,這對于人形機器人的精細操作至關重要。例如,在進行復雜的裝配任務或醫療手術輔助操作時,操作員可以通過手套精確地控制機器人的手指動作,完成各種復雜任務。

SenseGlove的力反饋系統能夠在短時間內輸出最大20N的阻力,讓操作員在遠程操作機器人時能夠感受到機器人末端執行器握持物體的力度和觸感。這使得操作員能夠更準確地控制機器人的動作和力度,避免錯誤操作。
除了力反饋外,SenseGlove手套還具有振動觸覺反饋功能,可以模擬按鈕點擊、沖擊以及再現物體表面紋理等感覺。在控制機器人完成交互任務時,振動反饋功能可以讓操作員更直觀地感受機器人與周圍環境的接觸情況,例如機器人在抓取物體時是否穩定等。

SenseGlove Nova2力反饋手套結合了主動接觸反饋、手掌沖擊和手指追蹤等先進的觸覺反饋技術,使得操作員在遠程操作時能夠感受到物體的材質、紋理、重量以及大小和硬度等物理特性,從而增強了操作的真實感和沉浸感。
SenseGlove擁有強大的兼容性,可用于整合手套、機器人、虛擬現實頭顯等關鍵組件。以確保操作員能夠在虛擬現實環境中對機器人進行直觀的操作和控制。
SenseGlove的通信模塊負責在手套、機器人手臂、虛擬現實頭顯等設備之間建立穩定、高效的通信連接。這確保了用戶手部動作的信息能夠及時、準確地傳輸到機器人手臂,同時機器人手臂的反饋信息和攝像機的圖像信息也能夠快速地傳輸給用戶。
Dexmo是一款便攜的力反饋手套,專為研究者,企業和消費者設計。它所提供的自然、直接的觸感力反饋讓每一位使用者都能真實與沉浸式VR世界中的物體完成交互。


Dexmo僅重300克左右。告別了市面其他產品笨重的體積和礙事的數據線,Dexmo提供無線的力反饋方案,外觀簡潔,榮獲多個國際設計大獎。由1800毫安的鋰電池供電,Dexmo可以無線連續工作6小時,電機可產生最大5 kg.cm的扭矩,這使得長時間、高性能的開發和使用體驗成為可能。

Dexmo可捕捉11個自由度的手部動作。除了檢測所有手指的彎曲和并攏動作外,它還為拇指引入了額外的旋轉檢測,使其能夠最大限度地靈活捕捉手部動作。

得益于高度定制的伺服電機,緊湊的電路設計和先進的控制算法,與其他同尺寸電機相比,Dexmo的直驅電機精度更高,扭矩輸出更大,延遲更低,可模擬不同剛性物體抓握時的觸感。Dexmo內置多個振動馬達,這些馬達可以產生真實的震動反饋,以模擬不同材質表面的觸感。
CyberGrasp系統是一個創新的手部力反饋系統。它可以讓您“把手伸進你的電腦”,抓住電腦生成的或遠程操縱的物體。

CyberGrasp是一種輕型的力反射外骨骼設備,可以套在CyberGlove數據手套(有線版本)上,并為每個手指增加阻力反饋。通過CyberGrasp力反饋系統,用戶能夠在模擬的虛擬世界中感受計算機生成的3D對象的大小和形狀。
抓握力是由通過外骨骼傳遞到指尖的肌腱網絡產生的。CyberGrasp有五個致動器,每個手指一個,可以單獨編程,以防止用戶的手指穿透或壓碎虛擬固體物體。高帶寬致動器位于小型致動器模塊中,該模塊可以放置在桌面上。此外,由于CyberGrasp系統不提供接地力,致動器模塊也可以放在GraspPack背包中,便于攜帶操作,大大增加了有效工作空間。
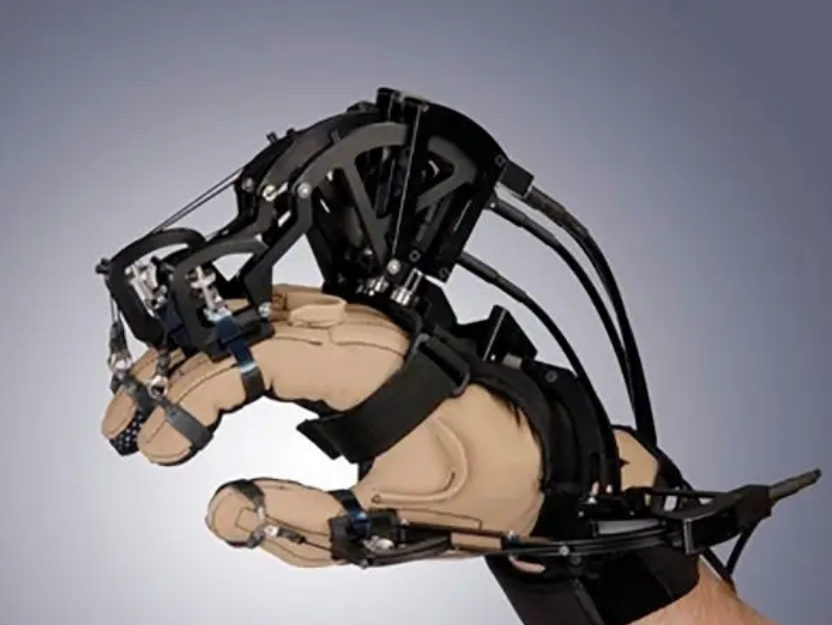
該設備在整個運動范圍內可施加垂直于指尖的抓握力,并且力可以單獨指定。CyberGrasp系統允許手的全方位運動,并且不會妨礙佩戴者的運動。該設備完全可調,適合各種手型。
CyberGrasp系統最初被用于軍事模擬訓練和遙控機器人應用,它允許操作員控制遠程機器人,并真實“感受”被操縱物體的尺寸、形狀與剛性。
