服務熱線
Shadow hand是由英國Shadow Robot Company開發的一款多自由度仿人靈巧手,可以實現高精度的三維運動和靈活的操作。采用了高精度的傳感器和控制算法,可以實現毫米級的精度和微米級的分辨率,可以滿足不同領域高精度操作的需求。同時還配備了控制器和軟件平臺,可以支持多種編程語言和操作系統,如C++、Python和ROS等。用戶可以通過編寫程序和調用API接口,實現機械手臂的自動化控制和定制化操作。提供了可視化界面和遠程控制功能,方便用戶進行遠程操作和監控。主要用于工業自動化、醫療器械、科學研究等領域。

1、Shadow Dextrous Hand是科研教學和工業應用領域值得信賴的機器人產品。
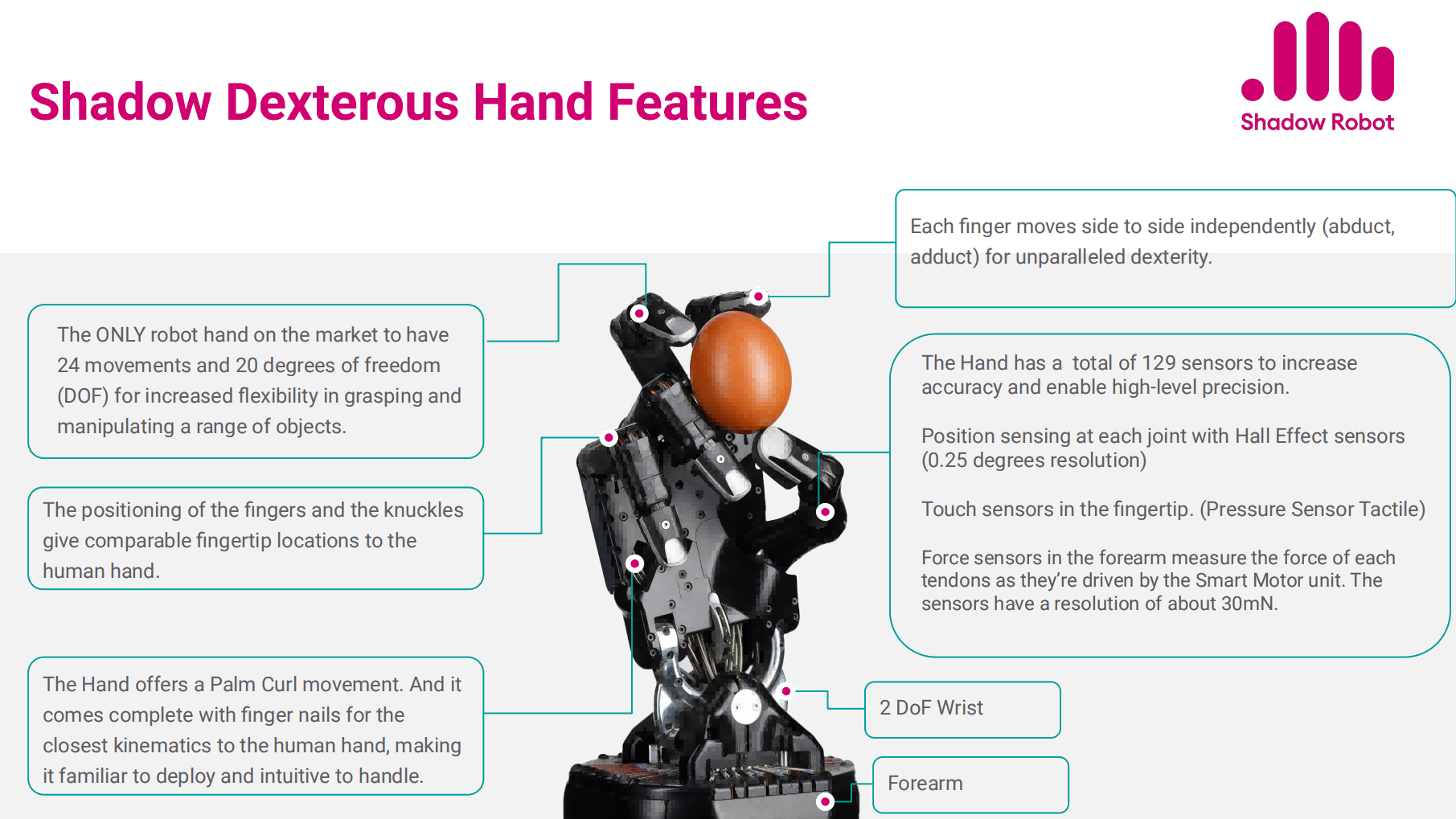
2、包含 20 個電機,由肌腱驅動,允許內收和外展運動有 24 個自由度。
3、擁有 100 多個運行頻率高達 1KHz 的傳感器,為您提供洞察力和準確的數據點以支持您的研究。
4、壓力傳感器觸覺 (PST) 作為標準安裝在指尖。
5、完全集成 ROS,可用作研發工具以及人工智能和機器學習的測試硬件。
6、與Shadow Glove 和遠程操作系統一起使用,該手可以在遠程或危險環境中提供直觀的控制和無與倫比的精度。
