服務熱線
HAPTION Virtuose 6D RV力反饋設備
Virtuose 6D RV為一款具有大工作空間并在所有6自由度上提供力反饋的觸覺設備,設計專用于虛擬現實環境,特別適合于大型虛擬物體的處理。
6D虛擬化與Haption軟件產品組合兼容,使用戶可以直接在CAD軟件中使用Virtuose 6D RV來創建部件仿真和三維開發平臺,以創建身臨其境的體驗。
歸功于其大工作空間和高性能,該款設備與CAD數字化模型實現了一個成規模的互動。

? 項目審查
技術特點
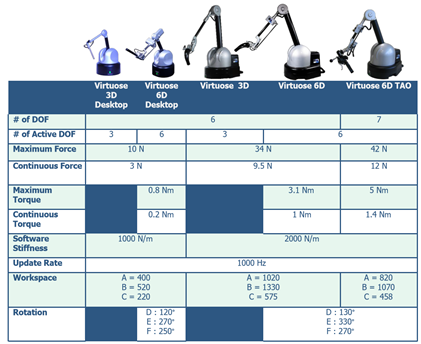
Virtuose 6D RV提供如下特點:
? 所有6自由度上的力反饋( 3個平移和3個旋轉)
? 操作工作空間對應于一個人體手臂的動作
? 構成臂的分段長度:450毫米
? 超大力度為35N( 10 N連續),即提供足夠高度模擬重物操作
? 超大旋轉扭矩為3Nm (1 Nm持續),即提供足夠高度用于大型虛擬對象的兩手處理
? 設備自身重量的精確靜態補償
? 模塊化末端效應器配備程控開關
? 夾持工具配備接近傳感器,連接至一項“dead-man”功能:只要用戶未在手中持有夾持工具,或者當用戶松開手中的 夾持工具時,電機將關閉,不會發生任何主動活動
? 重量減輕,可不使用特定設備實現運輸
? 主操作系統提供開發工具包(API)
? 證明與目前市場上的主流應用軟件具有兼容性,可使用專用插件:VortexTM、HavokTM、ODE、VirtoolsTM、CatiaTM V5、DelmiaTM V5、ICIDO VDP、SenseGraphics、OpenMask等
? 兼容跟蹤系統,如ART、Vicon、Motion Analysis
應用范圍
適用于虛擬現實、項目審查、人機工程學分析、功能測試、裝配/拆卸、工作環境仿真、操作人員培訓、醫療培訓、遠程外科手術等諸多領域。
技術特征
? 所有6自由度上的力反饋( 3個平移和3個旋轉)
? 操作工作空間對應于一個人體手臂的動作
? 構成臂的分段長度:450毫米
? 超大力度為35N( 10 N連續),即提供足夠高度模擬重物操作
? 超大旋轉扭矩為3Nm (1 Nm持續),即提供足夠高度用于大型虛擬對象的兩手處理
? 設備自身重量的精確靜態補償
? 模塊化末端效應器配備程控開關
? 夾持工具配備接近傳感器,連接至一項“dead-man”功能:只要用戶未在手中持有夾持工具,或者當用戶松開手中的 夾持工具時,電機將關閉,不會發生任何主動活動
? 重量減輕,可不使用特定設備實現運輸
? 主操作系統提供開發工具包(API)
? 證明與目前市場上的主流應用軟件具有兼容性,可使用專用插件:VortexTM、HavokTM、ODE、VirtoolsTM、CatiaTM V5、DelmiaTM V5、ICIDO VDP、SenseGraphics、OpenMask等
?兼容跟蹤系統,如ART、Vicon、Motion Analysis